


See kombitsitaoline robotkäsi kasutab liikumiseks magneteid, mitte mootoreid
Shuai Wu, Qiji Ze, Jize Dai, Nupur Udipi, Glaucio H. Paulion ja Ruike Zhao
Sarnaselt kunstiga jäljendab ka teadus elu. Sel juhul ehitasid mõned nutikad teadlased põneva robotkäe, mis näeb välja ja liigub nagu kaheksajala kombits. See vajub peaaegu tasaseks kokku ja võib välja sirutada, et jõuda alusest kaugel asuvate asjadeni. Aga sa oled üllatunud, kuidas see niimoodi liigub.
Uue roboti disaini ja liikumist kirjeldati üksikasjalikult hiljuti ajakirjas PNAS avaldatud artiklis. Need, kes selle loomisega tegelesid, arutavad oma inspiratsiooni – ja kaheksajala – ning seda, kuidas nad kasutavad magnetvälja, origami-laadseid volte ja pehmet eksoskeletti mitmes segmendis, et anda käele selle ainulaadne, mitmekülgne välimus ja liikumisvõime.
Stanfordi ülikooli masinaehituse dotsent ja artikli kaasautor Ruike Renee Zhao ütles ajakirjale Popular Science: "Kaheksajala närvisüsteem asub tegelikult tema käte vahel. See, mida me siin teeme, on väga intelligentse käesüsteemi jäljendamine. Kuna selle käsi on nii mitmekülgne, võib sellel objektidega suhtlemiseks olla sadu, tuhandeid erinevaid liigutusi.
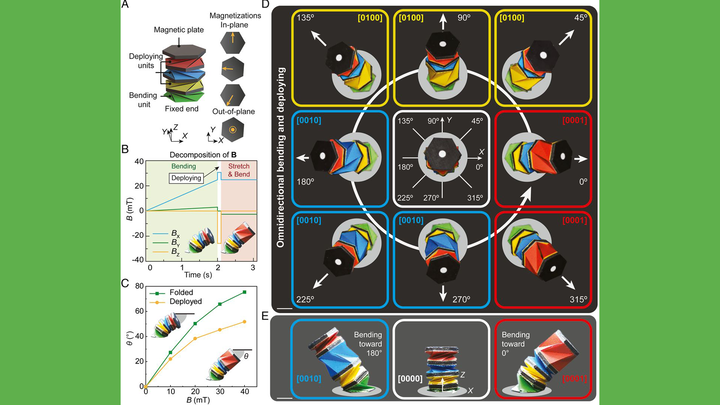
Iga üksiku käe seest leiate väikeste segmentide jada. Igas segmendis on kaks pehmet silikoonist kuusnurkset plaati, millest igaüks on kaetud magnetosakestega, ja kallutatud plastpaneelid, mis sisaldavad roboti ikoonilist origami mustrit. Eelkõige nimetatakse seda mustrit Kreslingi mustriks, mis on mõeldud kokkutõmbumisel ja pikenemisel venitamiseks, kokkusurumiseks ja keerdumiseks.
Shuai Wu, Qiji Ze, Jize Dai, Nupur Udipi, Glaucio H. Paulion ja Ruike Zhao
Zhao ja teised roboti loojad loodavad, et see leiab oma rakenduse biomeditsiini maailmas. Ideaalis võiks seda kasutada minimaalselt invasiivsete meditsiiniliste protseduuride, näiteks kateetri või hingamistoru sisestamise abistamiseks.
Unikaalset robotit juhitakse eemalt, manipuleerides tugeva magnetvälja ja välise magnetajamiga. Kui teadlaste meeskond käsivart ehitas ja katsetas, ehitasid nad selle ümber kolmemõõtmelise magnetvälja. Nad panid selle liikuma, muutes käe ümber oleva välja suunda ning panid selle liikuma ja painutama, luues väiksemate segmentide juhtimiseks (ja selle liigutuste peenhäälestamiseks) pöördemomendi. Nad saavad isegi juhtida, millised käe osad painduvad ja millised jäävad kokkusurutud või sirgelt ette sirutatud.
Zhao ja meeskond ütlesid, et kõik käega seotud on kohandatav, näiteks selle suurus, segmendi kogus, materjali koostis ja magnetiseerimise tugevus. See muudab masstootmise kasutuselevõtu meditsiinimaailmas (või mujal) kasutamiseks veelgi lihtsamaks. See on nutikas leiutis, millest on kindlasti abi mitmes tööstusharus. Siin saate PNAS -is vaadata mõnda GIF-i ja lühikesi videoid teadusliku testimise kohta .
populaarteaduse kaudu