


Dieser Tentakel-ähnliche Roboterarm bewegt sich mit Magneten, nicht mit Motoren
Shuai Wu, Qiji Ze, Jize Dai, Nupur Udipi, Glaucio H. Paulion und Ruike Zhao
Ähnlich wie die Kunst ahmt auch die Wissenschaft das Leben nach. In diesem Fall bauten einige clevere Wissenschaftler einen faszinierenden Roboterarm, der aussieht und sich bewegt wie der Tentakel eines Oktopus. Es lässt sich fast flach zusammenklappen und kann sich ausdehnen, um Dinge zu erreichen, die weit von seiner Basis entfernt sind. Aber Sie werden überrascht sein, wie es sich so bewegt.
Das Design und die Bewegung des neuen Roboters wurden in einem kürzlich veröffentlichten Artikel in der Zeitschrift PNAS ausführlich beschrieben. Diejenigen, die an der Erstellung mitgearbeitet haben, sprechen über ihre Inspiration – und den Oktopus – und wie sie ein Magnetfeld, origamiartige Falten und ein weiches Exoskelett über mehrere Segmente hinweg verwenden, um dem Arm sein einzigartiges, vielseitiges Aussehen und seine Bewegungsfähigkeit zu verleihen.
Ruike Renee Zhao, Assistenzprofessor für Maschinenbau an der Stanford University und Co-Autor des Artikels, sagte gegenüber Popular Science: „Beim Oktopus befindet sich sein Nervensystem tatsächlich in seinen Armen. Was wir hier tun, ahmt ein hochintelligentes Armsystem nach. Weil sein Arm so vielseitig ist, könnte er Hunderte, Tausende verschiedener Bewegungen ausführen, um mit Objekten zu interagieren."
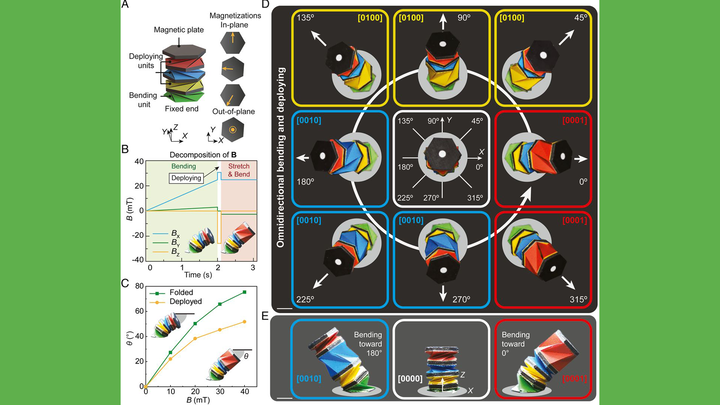
In jedem einzelnen Arm finden Sie eine Reihe kleiner Segmente. In jedem Segment befinden sich zwei weiche sechseckige Silikonplatten, die jeweils mit Magnetpartikeln und geneigten Kunststoffplatten eingebettet sind, die das ikonische Origami-Muster des Roboters darstellen. Dieses Muster wird insbesondere als Kresling-Muster bezeichnet, das sich beim Zusammenziehen und Strecken dehnen, komprimieren und verdrehen soll.
Shuai Wu, Qiji Ze, Jize Dai, Nupur Udipi, Glaucio H. Paulion und Ruike Zhao
Zhao und die anderen Schöpfer des Roboters hoffen, dass er seine Anwendung in der biomedizinischen Welt finden wird. Idealerweise könnte es verwendet werden, um bei minimalinvasiven medizinischen Verfahren wie dem Einführen von Kathetern oder Beatmungsschläuchen zu helfen.
Der einzigartige Roboter wird ferngesteuert, indem ein starkes Magnetfeld und ein externer magnetischer Aktuator manipuliert werden. Während das Wissenschaftlerteam den Arm baute und testete, baute es ein dreidimensionales Magnetfeld um ihn herum auf. Sie brachten es dazu, sich zu bewegen, indem sie die Richtung des Felds um den Arm herum änderten, und brachten es sogar dazu, sich zu bewegen und zu biegen, indem sie ein Drehmoment erzeugten, um die kleineren Segmente anzutreiben (und ihre Bewegungen fein abzustimmen). Sie können sogar steuern, welche Teile des Arms sich beugen und welche gestaucht oder geradeaus gestreckt bleiben.
Zhao und das Team sagten, dass alles am Arm anpassbar ist, wie Größe, Segmentmenge, Materialzusammensetzung und Magnetisierungsstärke. Dies macht es noch einfacher, es zur Massenproduktion für den Einsatz in der medizinischen Welt (oder anderswo) zu bringen. Es ist eine clevere Erfindung, die in verschiedenen Branchen sicher hilfreich sein wird. Sie können sich hier auf PNAS einige GIFs und kurze Videos der wissenschaftlichen Tests ansehen .
über Populärwissenschaft