


Этот робот-манипулятор, похожий на щупальце, использует для движения магниты, а не двигатели
Шуай Ву, Циджи Зе, Джизе Дай, Нупур Удипи, Глаусио Х. Паулион и Руике Чжао
Подобно искусству, наука также имитирует жизнь. В этом случае некоторые умные ученые построили удивительную роботизированную руку, которая выглядит и движется как щупальце осьминога. Он складывается почти до плоского состояния и может растягиваться, чтобы дотянуться до предметов, находящихся далеко от его основания. Но вы будете удивлены тем, как он движется.
Конструкция и движение нового робота были подробно описаны в статье, недавно опубликованной в журнале PNAS. Те, кто работал над его созданием, обсуждают свое вдохновение — и осьминога — и то, как они используют магнитное поле, складки, похожие на оригами, и мягкий экзоскелет из нескольких сегментов, чтобы придать руке уникальный, универсальный внешний вид и способность двигаться.
Руике Рене Чжао, доцент кафедры машиностроения Стэнфордского университета и соавтор статьи, рассказал Popular Science: «У осьминога нервная система фактически находится в его руках. Здесь мы имитируем высокоинтеллектуальную систему рук. Поскольку его рука настолько универсальна, у нее могут быть сотни, тысячи различных движений для взаимодействия с объектами».
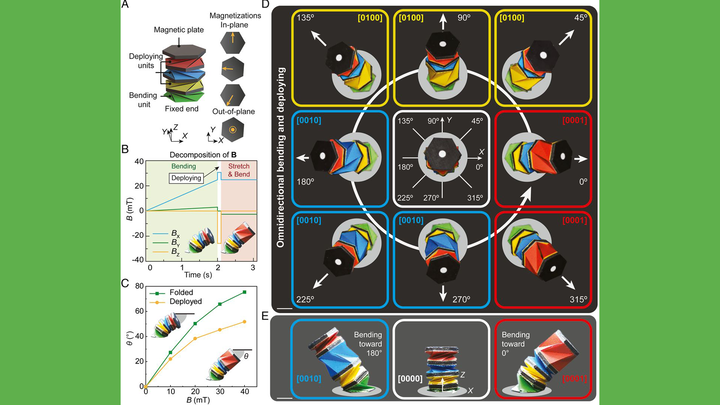
Внутри каждой отдельной руки вы найдете ряд небольших сегментов. Внутри каждого сегмента есть две мягкие силиконовые шестиугольные пластины, каждая из которых снабжена магнитными частицами, и наклонные пластиковые панели, которые составляют культовый рисунок робота-оригами. Этот паттерн, в частности, называется паттерном Креслинга, он предназначен для растяжения, сжатия и скручивания по мере того, как он сжимается и удлиняется.
Шуай Ву, Циджи Зе, Джизе Дай, Нупур Удипи, Глаусио Х. Паулион и Руике Чжао
Чжао и другие создатели робота надеются, что он найдет применение в биомедицинском мире. В идеале его можно использовать для помощи в минимально инвазивных медицинских процедурах, таких как установка катетера или дыхательной трубки.
Уникальный робот управляется дистанционно, манипулируя сильным магнитным полем и внешним магнитным приводом. Пока команда ученых строила и тестировала руку, они создали вокруг нее трехмерное магнитное поле. Они заставили его двигаться, изменяя направление поля вокруг руки, и даже заставляли его двигаться и изгибаться, создавая крутящий момент для приведения в движение меньших сегментов (и точной настройки его движений). Они даже могут контролировать, какие части руки сгибаются, а какие остаются сжатыми или вытянутыми прямо вперед.
Чжао и его команда сказали, что в руке можно настраивать все, например ее размер, количество сегментов, состав материала и силу намагничивания. Это еще больше упрощает массовое производство для использования в медицине (или где-либо еще). Это умное изобретение, которое обязательно поможет во многих отраслях. Вы можете просмотреть несколько GIF-файлов и коротких видеороликов о научных испытаниях здесь, на PNAS.
через популярную науку